
はじめに
みやこ電子工房は種子島で開催される種子島ロケットコンテストに出場することが決まりました。
cansat部門 自動制御カムバックにて優勝を目指して活動します。
出場チーム名は「Werksatt」です。ドイツ語「工房」の意味です。
協賛
本活動ではローランド ディー.ジー.株式会社にご協賛いただいております。機体の製作費についてご支援頂きました。この場を借りてお礼申し上げます。ありがとうございます。
ローランド ディー.ジー.株式会社は静岡県浜松市所在、大型プリンター中心の電化製品メーカーです。


ロボット降下中にローランド ディー.ジー.株式会社のロゴが見えるようになっています。
大会概要
- 主催 種子島ロケットコンテスト大会実行委員会
- 日時 2023年3月2日~2023年3月6日
- 開催地 鹿児島県 JAXA種子島宇宙センター

競技について
ロケットコンテストではいくつかの種目が同時開催されます。
我々が出場するのはcansat部門 自動制御カムバックです。cansatとは、缶に収まる人工衛星を模したモノです。自動制御カムバックでは、cansatを30mの高さまでクレーンで釣り上げ落下させます。落下後無事パラシュートを開き損傷なく着地できどれだけ目的地に近づけるかを競います。
製作した機体
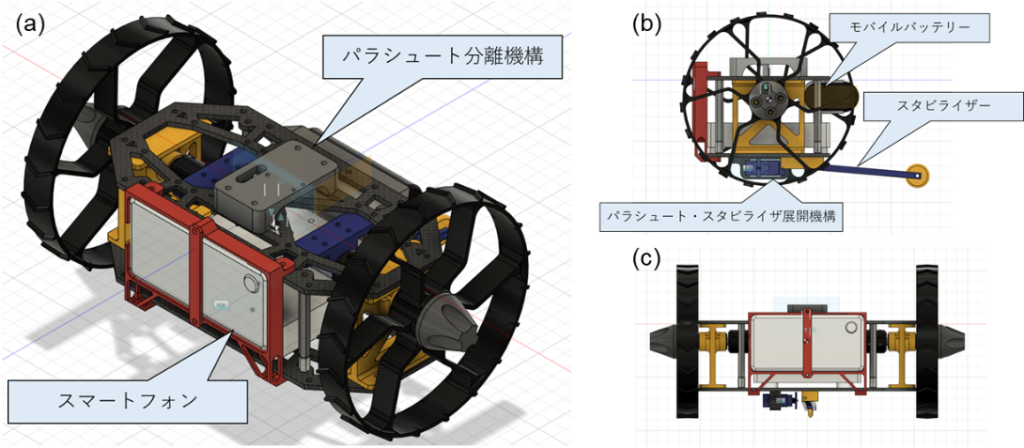
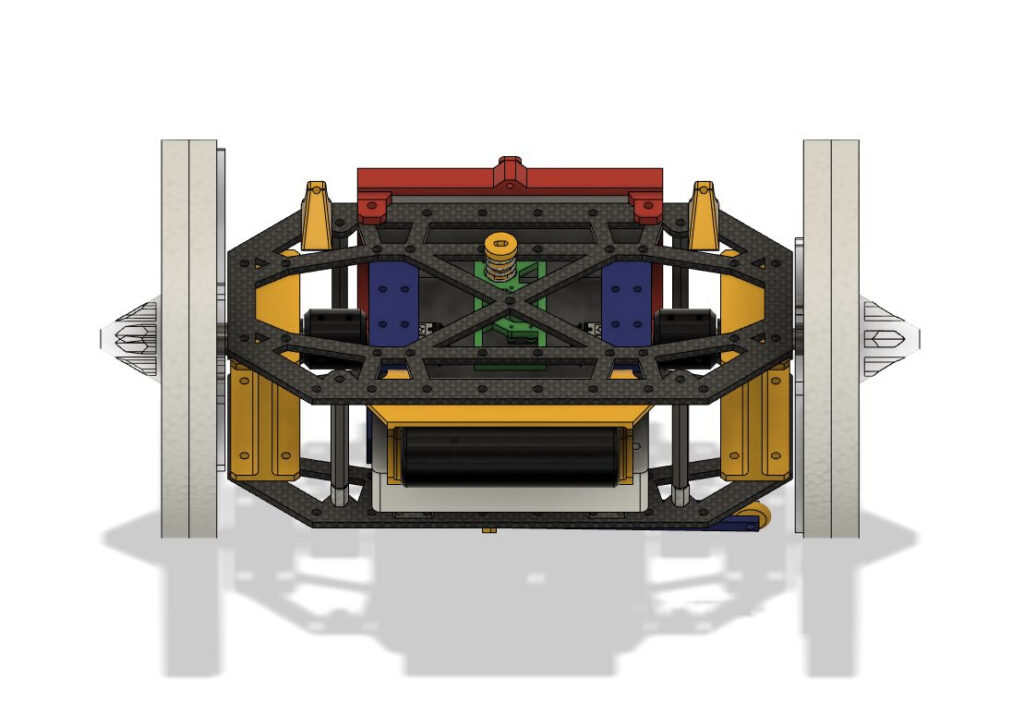
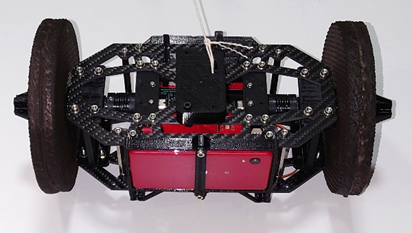
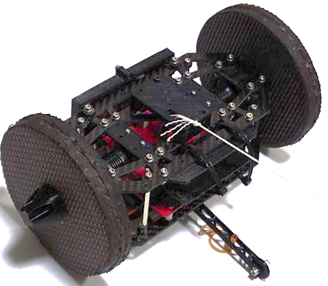
機体は缶状で筒に収まるような形になっています。直径145mm 長さ298mmです。
・本体フレームは軽くて頑丈なCFRPを採用しています。このフレームを中心にして、スマートフォン(後述)、電子回路、タイヤ、パラシュートなどを固定します。
・タイヤには落下の衝撃を受け止められるように柔らかいEVAを採用しています。走行するのは芝生の上です。柔らかい素材は芝生の上での走行にも一役買ってくれており問題なく走れています。
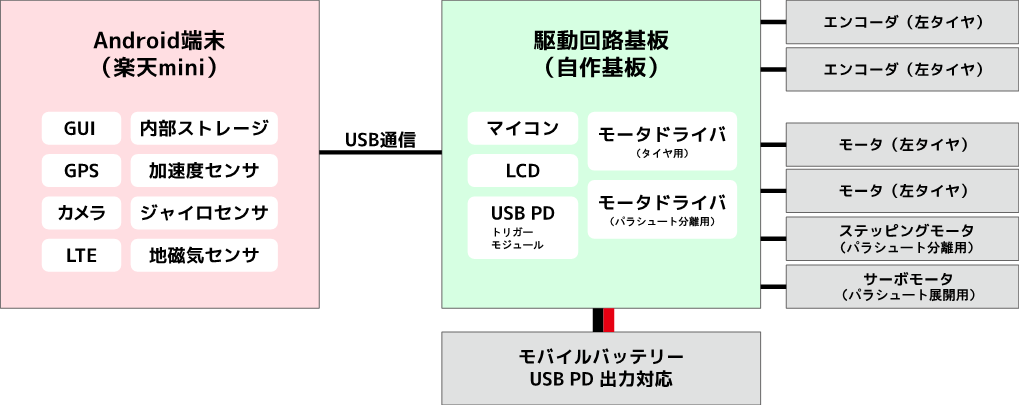
搭載するセンサと駆動系
cansat機体は落下中の機体制御、落下後の目的地への走行のためにセンサをたくさん搭載する必要があります。加えて機体が走行するための駆動系も必須です。
- ジャイロ、加速度・・・・・落下中の機体制御
- GPS、地磁気、カメラ・・・目的地割り出し
- DCモータ・・・・・・・・・走行
- ステッピングモータ・・・・パラシュート操作
- マイクロサーボ・・・・・・スタビライザー操作
androidスマートフォン
センサ類を簡単に搭載するためにスマートフォンを採用しました。必要なセンサを一個にまとまった優秀なパッケージでした。
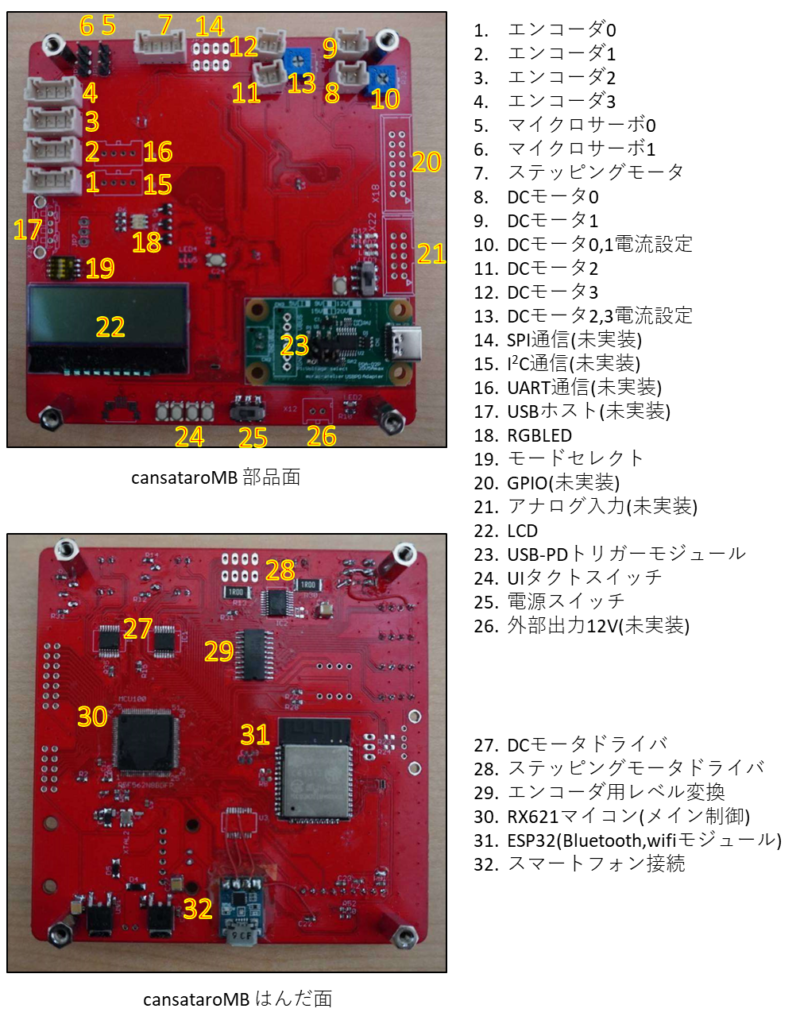
駆動系用基板
駆動系は専用に新しく基板を起こしました。大きな機体ではないので一枚の基板にモータドライバ含めて搭載です。スマートフォンと通信してタイヤを回転させたりパラシュートを開いたりします。
USB-PD対応モバイルバッテリー
機体の電源にモバイルバッテリーを採用しました。一般的にはこのような場合リチウムイオン電池やリチウムポリマー電池を使用しますが、衝撃が加わる機体ですので若干扱いが心配です。そこで市販のUSB-PD対応のモバイルバッテリーを使いました。これなら出力も18Wあるし、入手性ヨシ。汎用性ヨシ。保護回路や安全回路ヨシで正解かもしれない。
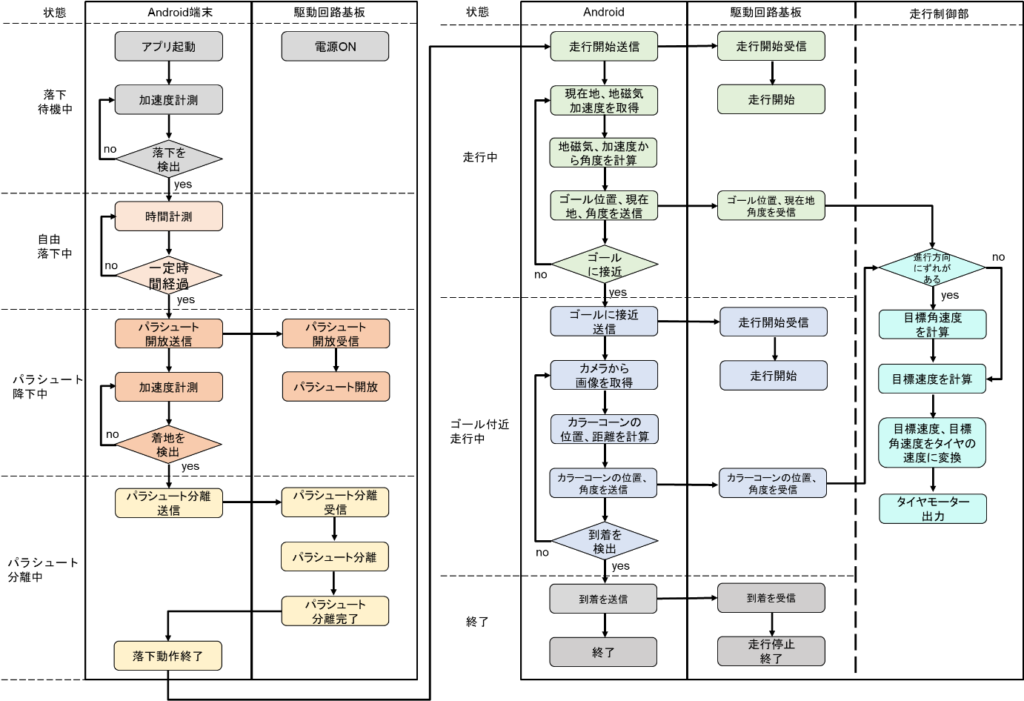
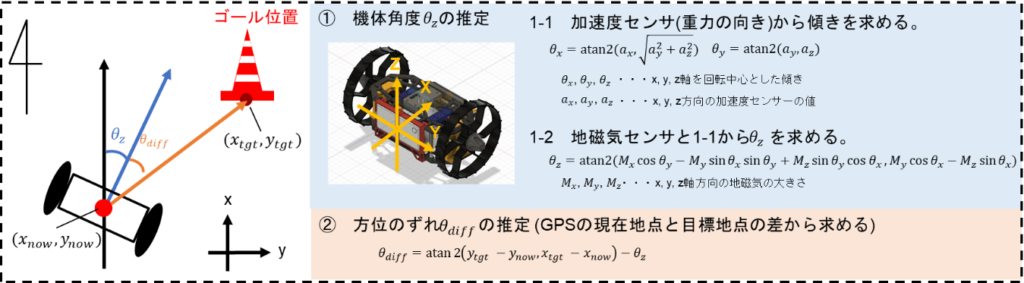
目的地までの走行
目的地にはカラーコーンが設置されています。(事前に目的地の緯度経度は測定可能)ある程度の距離まではGPSと地磁気センサで近づきます。GPSは数mの誤差があるのでカラーコーンを発見したらカメラで検知しながら近づいていきます。
androidソフトウェア
制御のために専用でandroidソフトウェアを開発しました。制御パラメータの調整、openCVによるカラーコーン検知もふくめたソフトウェアになっています。

メンバー
メンバーはみやこ電子工房として普段活動しているメンバーに加えて同郷の大学出身メンバーで構成されています。住んでいる場所が九州から関東まで散らばっているので製作が大変でした。

